Project Description
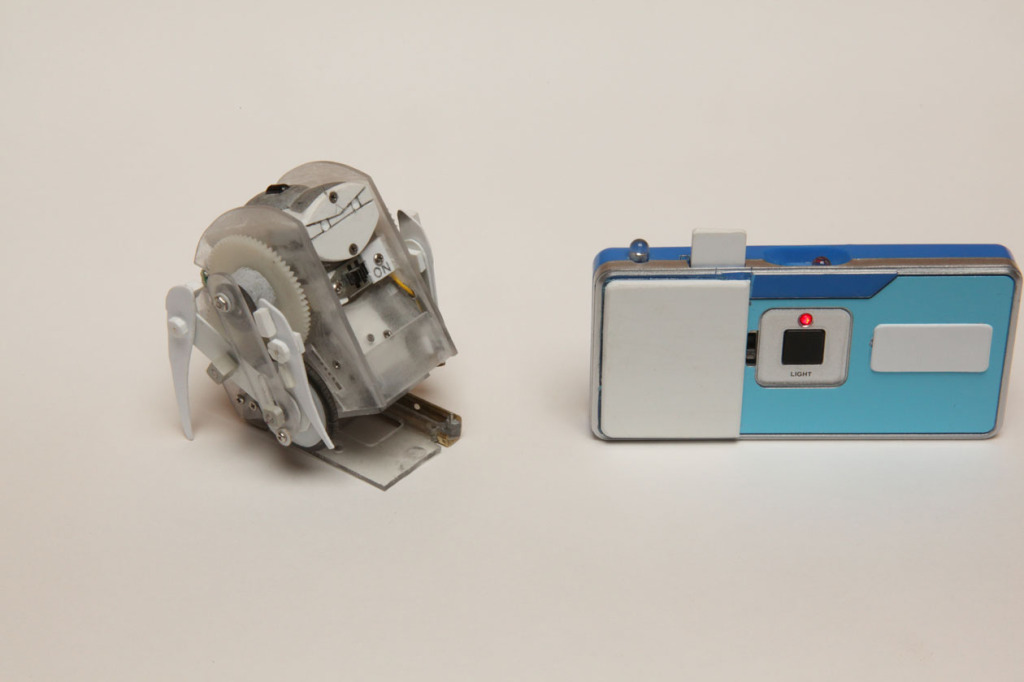
This was a prototype that I designed and built for SpinMaster Toys. The idea was to have a randomly moving robot to shoot at with an infra red beam. I built the random movement in by using two cams on one motor. One cam ran through a series of right/left moves. The other cam simultaneously ran through speed changes and starts and stops. Because the two cams were slightly out of phase with each other, and there was a little built-in slip to the movements, the resulting movements were virtually random and unpredictable. And cost effective with only one motor!
And when you managed to hit it with the beam, it would flip up and over backwards.